CAE技術者のスキルアップを応援します。 |
 |
02-3.周波数応答解析理論(モード法)|動解析入門
基礎方程式の導出
既出ですが、改めて動解析の基礎方程式は下式のようになります。
 ・・・(2-3-1)
・・・(2-3-1)
[M]:全体質量マトリクス、[C]:全体減衰マトリクス、[K]:全体剛性マトリクス、{F}:全体荷重ベクトル、{x}:全体変位ベクトル(上部に付いているドットの数はその微分の階数を表す)
モード座標系の変換は下式を用います。
 ・・・(2-3-2)
・・・(2-3-2)
ここで、[φ]はモーダルマトリクスと呼ばれ、下式のように固有ベクトルを並べたマトリクスです。
 ・・・(2-3-3)
・・・(2-3-3)
式(2-3-2)の1階微分、2階微分は以下のようになります。
 ・・・(2-3-4)
・・・(2-3-4)
 ・・・(2-3-5)
・・・(2-3-5)
荷重は正弦波加振ですので下式のようにおきます。
 ・・・(2-3-6)
・・・(2-3-6)
式(2-3-2)、式(2-3-4)、式(2-3-5)及び式(2-3-6)を式(2-3-1)に代入します。

・・・(2-3-7)
式(2-3-7)からeiωtを消去し、左から[φ]Tを乗じます。

・・・(2-3-8)
{ξ}で式を整理しますと

・・・(2-3-9)
剛性マトリクス[K]の両側から固有ベクトルのマトリクス[φ]を乗ずると、モード座標系に変換されるという話を02-1項で説明しましたが、同様に[M]、[C]もモード座標系に変換されます。ベクトルに関しては左から[φ]Tを乗ずることでモード座標系に変換されます。そしてモード座標系における変位ベクトルが{ξ}となります。
式(2-3-9)にωを代入した上でξについて解くことがモード法による周波数応答解析です。モード座標系における変位{ξ}を求めた後、式(2-3-2)によって物理座標系に戻して{x}を求めます。
このように物理座標系ではなく、モード座標系で解を求める手法がモード法です。
モード法で解くことのメリット
モーダルマトリクス[φ]によりモード座標系に変換すると、質量マトリクスと剛性マトリクスに関わる項は対角マトリクスになります。更に質量マトリクスで固有ベクトルを正規化した場合(02-1項で説明)、下式のように質量マトリクスは対角項がすべて1となる単位マトリクス[I]になり、剛性マトリクスは対角項が固有値となる対角マトリクスになります。
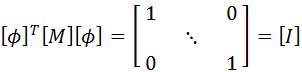 ・・・(2-3-10)
・・・(2-3-10)
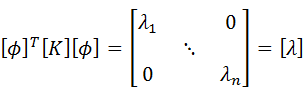 ・・・(2-3-11)
・・・(2-3-11)
減衰マトリクス[C]も対角化したいところですが、通常の減衰マトリクスは対角化することができません(減衰については別途説明)。
とりあえず、[C]=0の状況を考えますと、式(2-3-9)の左辺はすべて対角化されているわけですから、各成分を独立に扱うことができ(非連成という)、連立方程式を解く必要がなくなります。つまり各成分ごとにax=bをx=b/aとするだけで簡単に答えを求めることができます。
[C]≠0場合は左辺が対角化できないので、連立方程式を解く必要があります。しかし、現象を再現するのに最低限必要な固有モードだけ採用することで、解くべきマトリクスの次元を元のマトリクスの次元より圧倒的に少なくすることができます。
つまり平たく言えば、モード法は計算時間が早いのです。固有値解析を前もって実施しておく必要がありますが、それを踏まえても早いです。もちろん、すべてにおいて早いというわけではなく、計算モデルの規模や計算条件、使用する固有モードの数等にもよると思いますが・・。
ちなみにモード法では解析精度をある程度確保するには固有モードの抽出にノウハウがありますので注意が必要です(参考リンク:モード法の周波数応答、過渡応答解析におけるモード数)。